您好,歡迎訪問江蘇研茂包裝自動化有限公司!
- 網(wǎng)站地圖
- 聯(lián)系我們
- 關(guān)注微信
您好,歡迎訪問江蘇研茂包裝自動化有限公司!

全國免費咨詢熱線
4008501759
免費咨詢熱線
18016000798隨著物流業(yè)的不斷發(fā)展,集裝箱機器人已經(jīng)成為了一個不可或缺的物流設(shè)備。那么,集裝箱機器人是怎么工作的呢?本文將為大家介紹集裝箱機器人的工作原理以及操作步驟。
一、集裝箱機器人的工作原理
集裝箱機器人是一種自動化物流設(shè)備,其工作原理主要包括三個部分:導(dǎo)航、定位和搬運。
1.導(dǎo)航
集裝箱機器人在工作時需要進行導(dǎo)航,以便知道自己的位置和行進方向。目前市場上的集裝箱機器人主要采用激光雷達和視覺導(dǎo)航技術(shù)進行導(dǎo)航。激光雷達可以通過掃描周圍環(huán)境,獲取環(huán)境信息,從而確定自身的位置和行進方向。視覺導(dǎo)航技術(shù)則是通過攝像頭拍攝周圍環(huán)境,并通過圖像識別技術(shù)進行分析,從而實現(xiàn)導(dǎo)航。
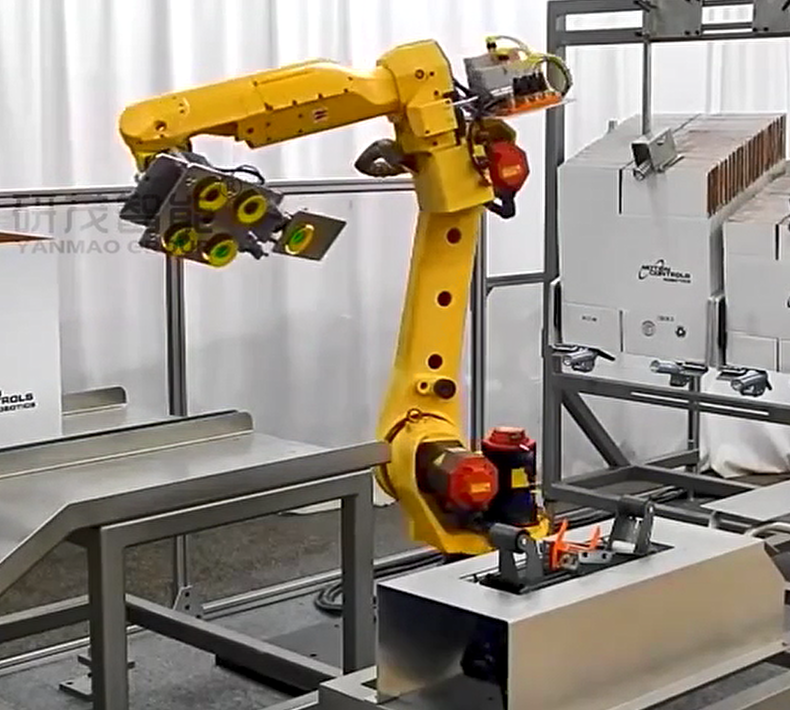
集裝箱機器人的工作?")
2.定位
集裝箱機器人在導(dǎo)航之后,還需要進行定位,以便準確抓取集裝箱。目前市場上的集裝箱機器人主要采用激光定位和GPS定位技術(shù)進行定位。激光定位可以通過激光雷達掃描集裝箱的位置和大小,從而確定集裝箱的位置和姿態(tài)。GPS定位則是通過衛(wèi)星定位技術(shù),確定集裝箱所在的位置和坐標。
3.搬運
集裝箱機器人在導(dǎo)航和定位之后,就可以進行搬運了。集裝箱機器人主要采用機械臂和吸盤等裝置進行搬運。機械臂可以通過控制器控制,準確地抓取集裝箱。吸盤則是通過吸附集裝箱表面,實現(xiàn)搬運。
二、集裝箱機器人的操作步驟
1.導(dǎo)航
集裝箱機器人在工作之前,需要進行導(dǎo)航。導(dǎo)航可以通過激光雷達或視覺導(dǎo)航技術(shù)進行。在導(dǎo)航之前,需要設(shè)置導(dǎo)航點和路徑,以便機器人知道自己的行進方向和位置。
2.定位
集裝箱機器人在導(dǎo)航之后,需要進行定位。定位可以通過激光定位或GPS定位技術(shù)進行。在定位之前,需要對集裝箱進行掃描和識別,以便確定集裝箱的位置和姿態(tài)。
3.搬運
集裝箱機器人在導(dǎo)航和定位之后,就可以進行搬運了。搬運可以通過機械臂或吸盤等裝置進行。在搬運之前,需要對集裝箱進行抓取和吸附,以便準確地搬運集裝箱。
三、小結(jié)
集裝箱機器人是一種自動化物流設(shè)備,其工作原理主要包括導(dǎo)航、定位和搬運。導(dǎo)航可以通過激光雷達或視覺導(dǎo)航技術(shù)進行,定位可以通過激光定位或GPS定位技術(shù)進行,搬運可以通過機械臂或吸盤等裝置進行。在操作集裝箱機器人時,需要進行導(dǎo)航、定位和搬運等操作步驟,以便準確地搬運集裝箱。
公司地址:江蘇省蘇州太倉市高新區(qū)蘇州中路585號洋沙工業(yè)園四號廠房 研茂集團專業(yè)提供自動包裝流水線,裝盒機,大袋包裝機,堆垛機一站式供應(yīng)商!
江蘇研茂包裝自動化有限公司 版權(quán)所有 備案號:蘇ICP備17003554號-3  蘇公網(wǎng)安備32058502010845 版權(quán)聲明 免責條款 開箱機裝箱機博客
蘇公網(wǎng)安備32058502010845 版權(quán)聲明 免責條款 開箱機裝箱機博客