您好,歡迎訪問江蘇研茂包裝自動化有限公司!
- 網(wǎng)站地圖
- 聯(lián)系我們
- 關注微信
您好,歡迎訪問江蘇研茂包裝自動化有限公司!

全國免費咨詢熱線
4008501759
免費咨詢熱線
18016000798關鍵詞:碼垛機器人控制系統(tǒng)設計論文范文
引言
隨著工業(yè)自動化技術的不斷發(fā)展,碼垛機器人作為一種高效、精準、可靠的物流設備,已經(jīng)廣泛應用于物流行業(yè)中。而碼垛機器人的控制系統(tǒng)則是其能夠完成各種復雜操作的關鍵。因此,對于碼垛機器人控制系統(tǒng)的設計與研究,一直是工業(yè)自動化領域的熱點問題。本文將以一個設計論文范文的形式,詳細介紹碼垛機器人控制系統(tǒng)的理論與應用研究。
一、碼垛機器人控制系統(tǒng)的概述
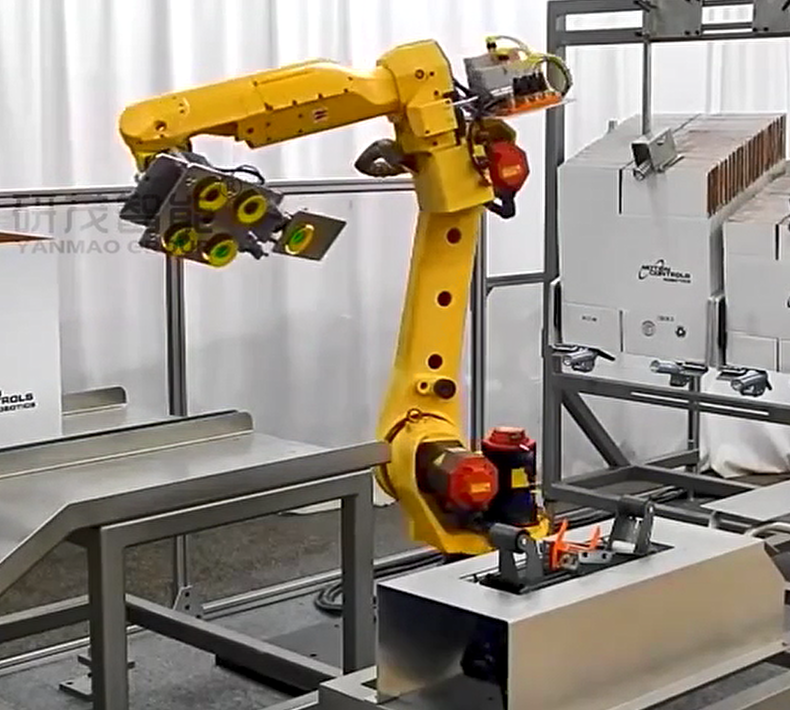
碼垛機器人控制系統(tǒng)是指通過對機器人的控制,使其能夠完成碼垛操作的系統(tǒng)。其主要由控制器、執(zhí)行機構、傳感器等組成。其中,控制器是整個系統(tǒng)的核心,負責對機器人進行控制和調(diào)度,而執(zhí)行機構則是機器人的動力來源,傳感器則是用來獲取機器人周圍環(huán)境信息的設備。
的理論與應用研究")
二、碼垛機器人控制系統(tǒng)的設計
1. 控制器的設計
控制器是整個系統(tǒng)的核心,其設計的好壞直接影響到系統(tǒng)的性能。在設計控制器時,需要考慮以下幾個方面:
(1)控制算法的選擇:控制算法是控制器的核心,其選擇直接影響到系統(tǒng)的性能。目前,常用的控制算法有PID控制、模糊控制、神經(jīng)網(wǎng)絡控制等。
(2)控制器的硬件選型:控制器的硬件選型需要考慮到系統(tǒng)的實時性、穩(wěn)定性、可靠性等因素。目前,常用的控制器硬件有PLC、單片機、DSP等。
(3)控制器的軟件設計:控制器的軟件設計需要考慮到系統(tǒng)的易用性、可維護性等因素。目前,常用的控制器軟件有C語言、LabVIEW等。
2. 執(zhí)行機構的設計
執(zhí)行機構是機器人的動力來源,其設計的好壞直接影響到機器人的工作效率和精度。在設計執(zhí)行機構時,需要考慮以下幾個方面:
(1)執(zhí)行機構的類型選擇:執(zhí)行機構的類型有很多種,如電機、氣動元件、液壓元件等。需要根據(jù)具體的應用場景選擇合適的執(zhí)行機構類型。
(2)執(zhí)行機構的驅(qū)動方式:執(zhí)行機構的驅(qū)動方式有直接驅(qū)動和間接驅(qū)動兩種。需要根據(jù)具體的應用場景選擇合適的驅(qū)動方式。
(3)執(zhí)行機構的控制方法:執(zhí)行機構的控制方法有位置控制、速度控制、力控制等。需要根據(jù)具體的應用場景選擇合適的控制方法。
3. 傳感器的設計
傳感器是用來獲取機器人周圍環(huán)境信息的設備,其設計的好壞直接影響到機器人的感知能力和工作精度。在設計傳感器時,需要考慮以下幾個方面:
(1)傳感器的類型選擇:傳感器的類型有很多種,如光電傳感器、壓力傳感器、溫度傳感器等。需要根據(jù)具體的應用場景選擇合適的傳感器類型。
(2)傳感器的靈敏度:傳感器的靈敏度直接影響到機器人的感知能力和工作精度。需要根據(jù)具體的應用場景選擇合適的傳感器靈敏度。
(3)傳感器的安裝位置:傳感器的安裝位置需要根據(jù)機器人的具體工作環(huán)境來選擇,以保證其能夠準確地獲取環(huán)境信息。
三、碼垛機器人控制系統(tǒng)的應用研究
碼垛機器人控制系統(tǒng)的應用研究主要包括以下幾個方面:
1. 碼垛機器人的路徑規(guī)劃
路徑規(guī)劃是碼垛機器人控制系統(tǒng)中的一個重要問題。在實際應用中,需要根據(jù)具體的工作場景來設計合適的路徑規(guī)劃算法,以保證機器人能夠高效、精準地完成碼垛操作。
2. 碼垛機器人的動力學建模
動力學建模是碼垛機器人控制系統(tǒng)中的一個重要問題。在實際應用中,需要根據(jù)機器人的具體結構和工作環(huán)境來建立動力學模型,以便進行控制器設計和控制算法的選擇。
3. 碼垛機器人的控制策略研究
控制策略是碼垛機器人控制系統(tǒng)中的一個重要問題。在實際應用中,需要根據(jù)具體的工作場景來設計合適的控制策略,以保證機器人能夠高效、精準地完成碼垛操作。
結論
本文以設計論文范文的形式,詳細介紹了碼垛機器人控制系統(tǒng)的理論與應用研究。通過對控制器、執(zhí)行機構、傳感器等方面的設計和應用研究,可以使碼垛機器人能夠高效、精準地完成各種復雜的碼垛操作。未來,隨著工業(yè)自動化技術的不斷發(fā)展,碼垛機器人控制系統(tǒng)的設計和應用研究將會更加深入和廣泛。
公司地址:江蘇省蘇州太倉市高新區(qū)蘇州中路585號洋沙工業(yè)園四號廠房 研茂集團專業(yè)提供自動包裝流水線,裝盒機,大袋包裝機,堆垛機一站式供應商!
江蘇研茂包裝自動化有限公司 版權所有 備案號:蘇ICP備17003554號-3  蘇公網(wǎng)安備32058502010845 版權聲明 免責條款 開箱機裝箱機博客
蘇公網(wǎng)安備32058502010845 版權聲明 免責條款 開箱機裝箱機博客