全國免費咨詢熱線
4008501759
免費咨詢熱線
18016000798碼垛機器人是一種應用廣泛的自動化堆碼設備,它可以根據預設的程序,自動完成物品的碼垛工作。那么,碼垛機器人的工作原理是什么呢?下面,我們將深入探究碼垛機器人的工作原理,了解其實現自動化堆碼的技術奧秘。
一、碼垛機器人的工作原理
碼垛機器人的工作原理可以簡單概括為:通過機械臂、傳感器、控制系統等組成的系統,實現對物品的自動化堆碼。具體來說,碼垛機器人的工作流程包括以下幾個步驟:
1. 物品的識別
碼垛機器人首先需要識別待堆碼的物品,這一過程通常使用傳感器完成。傳感器可以通過掃描物品的條形碼或二維碼,獲取物品的信息,從而確定物品的種類、尺寸等參數。

2. 堆碼方案的生成
根據物品的信息,碼垛機器人會自動生成堆碼方案。堆碼方案通常包括物品的擺放位置、層數、堆碼方式等參數。碼垛機器人可以根據這些參數,自動完成物品的堆碼工作。
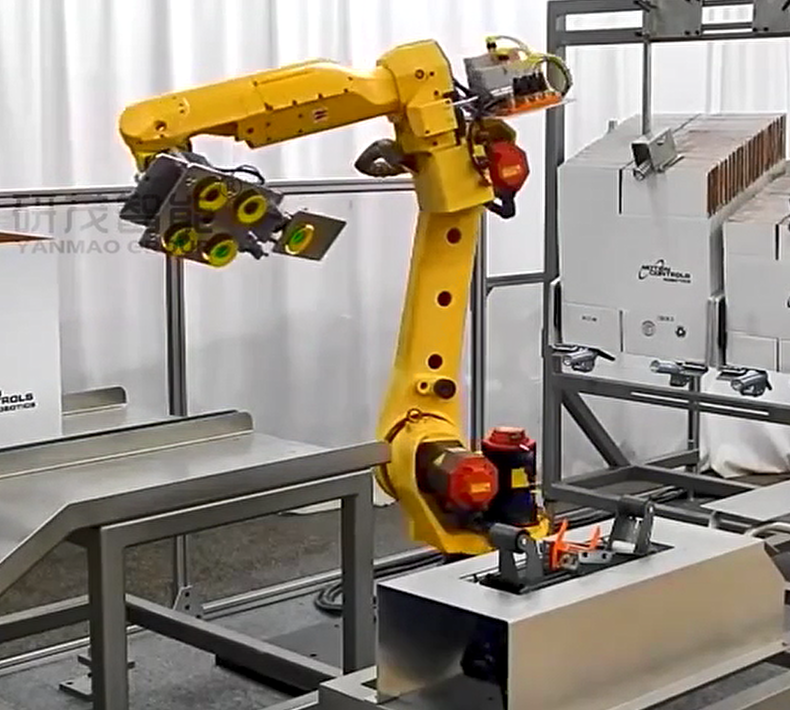
3. 機械臂的操作
碼垛機器人的核心部件是機械臂。機械臂可以根據堆碼方案,自動調整自身的姿態和位置,完成對物品的抓取、移動、放置等操作。機械臂的操作過程通常由控制系統完成。
4. 堆碼的完成
通過機械臂的操作,碼垛機器人可以將物品按照預設的方案,自動堆碼完成。在堆碼的過程中,機械臂需要保持穩定,確保物品的準確擺放和堆碼質量。
二、碼垛機器人的實現技術
碼垛機器人的實現技術涉及多個領域,包括機械設計、電氣控制、傳感器技術等。下面,我們將從這些方面,介紹碼垛機器人的實現技術。
1. 機械設計
碼垛機器人的機械設計是實現自動化堆碼的關鍵。機械設計需要考慮以下幾個方面:
(1)機械臂的結構設計
機械臂的結構設計需要考慮機械臂的穩定性、精度和負載能力等因素。同時,還需要考慮機械臂的自由度和工作范圍,以滿足不同場景下的堆碼需求。
(2)夾具的設計
夾具是機械臂的重要組成部分,它需要根據物品的尺寸、形狀等參數進行設計。夾具的設計需要考慮夾持力、夾持范圍和夾持方式等因素,以確保物品的安全和穩定。
2. 電氣控制
碼垛機器人的電氣控制是實現自動化堆碼的另一個關鍵。電氣控制需要考慮以下幾個方面:
(1)控制系統的設計
控制系統是碼垛機器人的核心部分,它需要完成物品的識別、堆碼方案的生成、機械臂的操作等功能。控制系統的設計需要考慮算法的優化、實時性和可靠性等因素。
(2)電機控制技術
電機控制技術是機械臂運動的關鍵。電機控制技術需要考慮電機的控制方式、速度和精度等因素,以確保機械臂的運動穩定和精度。
3. 傳感器技術
傳感器技術是碼垛機器人實現自動化堆碼的基礎。傳感器技術需要考慮以下幾個方面:
(1)識別技術
識別技術是傳感器的核心功能,它需要根據物品的特征,完成物品的識別和分類。識別技術可以使用條形碼、二維碼、RFID等技術實現。
(2)測量技術
測量技術是傳感器的另一個重要功能,它需要根據物品的尺寸、形狀等參數,完成物品的測量和定位。測量技術可以使用激光測距、視覺測量等技術實現。
三、碼垛機器人的應用場景
碼垛機器人在物流、制造業等領域有著廣泛的應用。下面,我們將介紹碼垛機器人的應用場景。
1. 物流行業
在物流行業,碼垛機器人可以完成貨物的自動化堆碼、揀選和分揀等工作。碼垛機器人可以提高物流效率,降低勞動成本,提高工作安全性。
2. 制造業
在制造業,碼垛機器人可以完成零部件的自動化堆碼、裝配和檢測等工作。碼垛機器人可以提高生產效率,降低勞動成本,提高產品質量。
四、結論
綜上所述,碼垛機器人是一種應用廣泛的自動化堆碼設備。碼垛機器人的工作原理是通過機械臂、傳感器、控制系統等組成的系統,實現對物品的自動化堆碼。碼垛機器人的實現技術涉及多個領域,包括機械設計、電氣控制、傳感器技術等。碼垛機器人在物流、制造業等領域有著廣泛的應用,可以提高工作效率,降低勞動成本,提高工作安全性和產品質量。
公司地址:江蘇省蘇州太倉市高新區蘇州中路585號洋沙工業園四號廠房 研茂集團專業提供自動包裝流水線,裝盒機,大袋包裝機,堆垛機一站式供應商!
江蘇研茂包裝自動化有限公司 版權所有 備案號:蘇ICP備17003554號-3  蘇公網安備32058502010845 版權聲明 免責條款 開箱機裝箱機博客
蘇公網安備32058502010845 版權聲明 免責條款 開箱機裝箱機博客